虛擬演播室的定位與校準
發布時間:2015-09-23 03:41:23 閱讀次數:6326
摘要:本文主要介紹虛擬演播室的定位與校準的重要性,并從攝像機的定位及校準、攝像機鏡頭的校準、機電跟蹤系統的校準和攝像機跟蹤系統運動參數的獲取四個方面介紹和闡述了虛擬演播室的定位與校準的方法。
關鍵詞:虛擬演播室;定位;校準;機電跟蹤系統
Abstract: This article mainly introduces the importance and its method of the positioning and calibration of the virtual studio from four aspects—the positioning and calibration of the camera, the
calibration of the camera lens, the calibration of the mechatronic tracking system and getting the
motion parameters of the camera tracking system.
Key words: virtual studio ;positioning;calibration;the mechatronic tracking system
虛擬演播室(Virtual Studio)是近年發展起來的一種獨特的電視節目制作技術,是在高速圖形計算機和視頻色鍵基礎上發展起來的演播室技術,是虛擬現實技術(Virtua1 Rea1ity)在廣播影視制作領域中的一項嶄新應用。在虛擬演播室系統中,現場視頻可以實時地與計算機產生的三維圖形完美無缺地集成在一起。虛擬演播室的場景是計算機生成的三維圖形,稱為虛擬場景。它的運動受計算機中虛擬攝像機的控制,為保證真實攝像機的前景畫面與虛擬場景“聯動”,必須使虛擬攝像機與真實攝像機的位置、拍攝角度及運動狀態相一致。因此,需要對真實攝像機進行實時跟蹤,獲取攝像機準確的位置信息和運動數據。
一、攝像機的定位及校準
為保證虛擬場景與真實攝像機的景物之間“聯動”,這就需要知道虛擬攝像機精確的位置信息,在實際中所要做的工作有:攝像機的定位。虛擬演播室系統的定位和校準可分為兩種:首次校定和日常校定。
1、攝像機的首次校定。首次定位首次校定是指安裝完之后,首次使用前的定位和校準。其主要目的是讓計算機感知真實演播室的大小和位置,并將其坐標和虛擬場景坐標進行鎖定,使他們的工作達到一致。首次校定可采用以下幾步:
1.1 攝像機的四點定位
用螺釘在演播室的藍箱背面上定四個點,必須訂成一個矩形平面,并將其長,寬及位于下方的兩點距離藍幕地板的垂直高度值輸入到圖形發生器的校準軟件中;經過軟件和攝像機校準小盒的設置,將真實攝像機的運動坐標與計算機虛擬攝像機的運動鎖定。
本文在藍箱的坐標系中(如圖1所示),定義幾個參數:
左上角A(xa,ya,za);
右上角B(xb,yb,zb);
左下角C(xc,yc,zc);
右下角D(xd,yd,zd);
攝像機的成像原點0(x。,y。,zo)
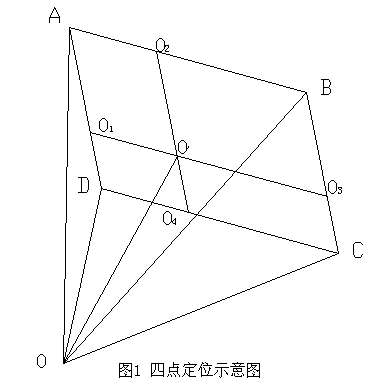
其中ABCD四點的坐標均已知,點O的坐標未知,也即是本文所要得到的參數。在實際中通過測量;在初次開拍前,固定攝像機的位置后,將攝像機的中心點分別對準藍幕上的四個點,通過攝像機校準小盒記錄這四次的攝像機的相對位置關系(包括水平和垂直的夾角);
1.2 攝像機位置測定
用水平儀及卡尺測量鏡頭光軸俯仰底座中心軸之間的垂直距離,及該中心軸與鏡頭后平面之間的垂直距離,并將測出的數值輸入校準軟件中。測量這些數值的目的是:讓計算機感知攝像機及其鏡頭的所在位置和相對關系。
2日常校訂
日常校定是指系統每次開啟后必須做的校準和定位,其目的是讓計算機感知攝像機所在的位置。日常校訂比較簡單,利用攝像機跟蹤系統小盒上的幾個按鈕,在進行演播時由計算機通過坐標變換進行校準即可。
二、攝像機鏡頭的校準。
攝像機鏡頭的校準主要用于真實攝像機與虛擬攝像機視域的匹配,在機電傳感定位中,真實攝像機鏡頭的焦點在變焦和聚焦時的移動是非線性函數,虛擬攝像機不能處理這種非線性問題,在首次適用前進行鏡頭校準。為簡單起見,我們假定光心就是像素設備幀緩存的中心,校準算法的總體思路是:首先根據攝像機成像的徑向約束條件近似估計攝像機的參數,然后用非線性迭代算法優化初始的攝像機參數。這種算法的優點是計算速度快,結果準確。
三、機電跟蹤系統的校準
虛擬演播室的參數跟蹤采用機電跟蹤設備完成,我臺選用的TOP3D-SET采用最新的光柵旋轉編碼器的高精度參數采集系統,采用8M頻響的采集電路,自適應初始化定位技術。其主要設備包括變焦鏡頭傳感器、固定在三腳架上的機電搖擺和俯仰的碼盤,主要用于在拍攝過程中攝像機的俯仰、搖擺、推拉等動作時進行校準。通過將機械運動轉變為電信號,然后利用串口把電信號傳送到用于繪制三維虛擬場景的計算機;計算機根據接收到的信號,轉換為虛擬攝像機(virtual camera)的參數,實時渲染生成三維虛擬背景;最后在視頻合成系統中將前景、背景進行摳像合成。
在機電傳感定位中,真實攝像機鏡頭的焦點在變焦和聚焦時的移動是非線性函數,虛擬攝像機不能處理這種非線性問題,需要在首次適用前進行鏡頭校準。鏡頭校準首次較準中最為復雜的一步。通過一個特制的標尺框(校準板:500×500毫米,由100×l00毫米的黑白方格交替排列組成)和PC機的鏡頭校準軟件,在鏡頭取景范圍的最大值和最小值之間測取100個樣值點,為計算機中的虛擬攝像機建立一條鏡頭變焦與取景角度之間的曲線。當真實像機的鏡頭推拉和變焦時,虛擬場景就能同步運動了。
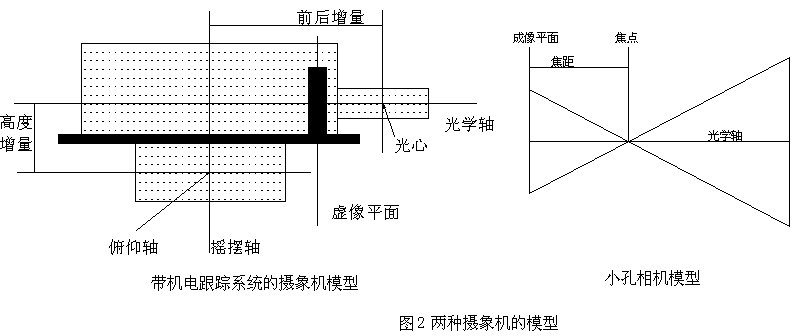
在虛擬演播室的3D或2D場景建模中,要準確跟蹤真實攝像機的運動,通常應用較多的是攝像機的俯仰和水平搖移,以及攝像機的焦距變化。在虛擬演播室首次啟用之前,對攝象機焦距進行校準,從而對真實攝像機準確建模。真實攝像機的位置是固定的,只需要使用搖擺和俯仰的角度旋轉虛擬攝像機,用變焦測量值推算出虛擬攝像機視域的大小。目前,圖形硬件都用一個簡單的小孔相機模型(未考慮視域深度、光線扭曲等因素)作為虛擬攝像機,帶有機電跟蹤系統的真實攝像機的光心的空間坐標作為小孔相機焦點的空間坐標。將這兩種運轉情況進行簡單的建模,如圖2所示。
攝像機的運動參數包括鏡頭運動參數(變焦zoom;聚焦focus;光圈試iris),機頭運動參數(搖移pan;俯仰tilt),及空間位置參數(地面位置x、Y和高度z)等。這些參數的獲取對虛擬演播室系統來說非常重要,它可直接影響到虛擬背景的生成。目前,可采用機械跟蹤方式和圖像分析識別方式獲得攝像機的這些運動參數,結合我臺的實際,我們采用機械跟蹤方式。
攝像機跟蹤系統中將帶有變焦鏡頭傳感器的攝像機安裝在固定的三腳架上,三腳架上帶有機電搖擺和俯仰的碼盤。傳感器跟蹤系統對于每個視頻場(對應搖擺、俯仰、變焦、聚焦)產生一組測量值(mPan、mtilt‘、tzoom、mfocus),由于接受的是碼盤的相對變化值,必須推算出用于渲染虛擬場景的虛擬攝像機的參數:在世界坐標系中的坐標(xvirtual,yvirtual,,zvirtual),搖擺角(apan)、俯仰角(atilt)、視域角(aview)。
首先,由于機電跟蹤系統安裝在固定的三腳架上,以藍箱的地面與背面交線的中心點為世界坐標系的原點,可以通過精確的測量得到俯仰軸與搖擺軸交叉點的空間坐標(xreal,yreal,zreal)
其次,如圖2所示,要得到帶有一機電跟蹤系統的攝像機模型的高度增量(dheigh)和前后增量(ddepth),其中高度增量可以通過精確測量得到,前后增量為兩個量相加得到,其中成像平面與搖擺軸的距離(dpan)可以通過精確測量得到,光心與成像平面的距離dzoom可以由變焦和聚焦參數變換得到,由于鏡頭要進行推拉,即變焦參數在發生變化,所以該增量也在發生變化,在實際的應用中采用實際測量加估計的方法,因為該增量的變化不是很大,隨著焦距的變化而進行相應的變化。
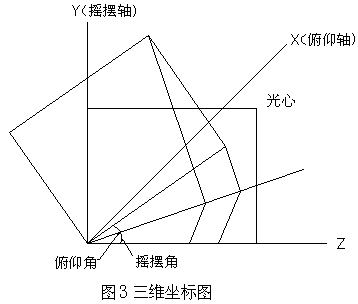
然后,選取俯仰軸與搖擺軸的交叉點作為坐標原點,如圖3所示,以俯仰軸為X軸,以搖擺軸為Y軸,以從原點出發垂直于X軸和Y軸的直線為Z軸,建立空間坐標系,經計算得到六個有用的參數位:光心在世界坐標系中的坐標(xvirtual,yvirtual,zvirtual,),搖擺角(apan)、俯仰角(atilt)、視域角(aview)。將這六個參數直接賦給虛擬攝像機,用于渲染三維虛擬場景即可。